
ปัจจุบันเราได้เห็นนักวิจัยประสบความสำเร็จในการฝึกหุ่นยนต์ 4 ขา ให้เรียนรู้การตอบสนองในรูปแบบต่างด้วย A.I. (Artificial Intelligence : ปัญญาประดิษฐ์) เช่น ลากเครื่องบินเล็ก น้ำหนัก 3,300 กิโลกรัม หรือปีนข้ามสิ่งกีดขวางต่าง ๆ เป็นต้น
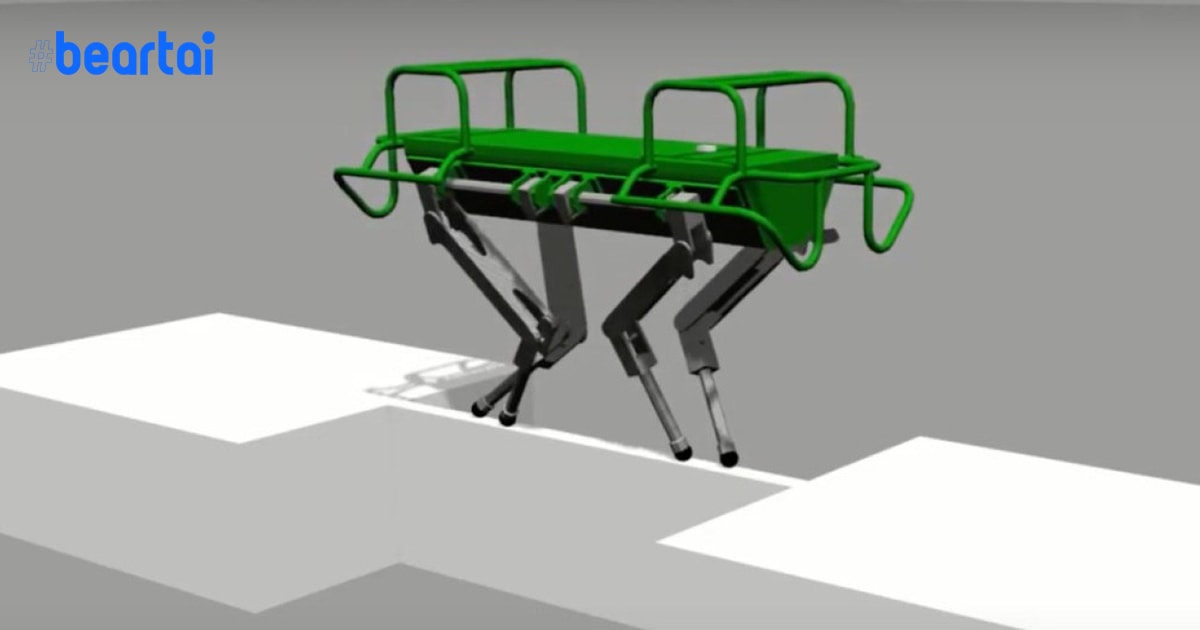
ล่าสุด ทีมวิจัยหุ่นยนต์จากประเทศอิตาลี นามว่า Instituto Italiano di Tecnologia (IIT) ได้สร้างตัวควบคุมหุ่นยนต์ (Robot Controller) ที่ช่วยให้หุ่นยนต์ 4 ขา สามารถเดินบนคานแคบ ๆ ได้
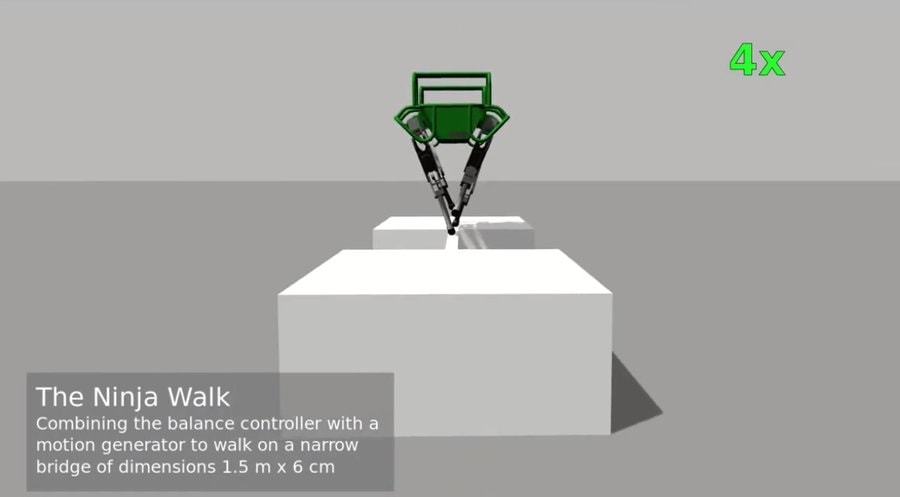
ทีมวิจัยได้สาธิตให้เห็นว่า ตัวควบคุมดังกล่าวช่วยให้ หุ่นยนต์ 4 ขา สามารถเดินด้วยปลายเท้าบนขา 2 ข้าง (หน้าและหลัง) ได้อย่างสมดุล ซึ่งส่งผลทำให้หุ่นยนต์หนัก 90 กิโลกรัม สามารถเดินบนคานแคบ ๆ ที่มีความกว้างเพียง 6 เซนติเมตร ได้
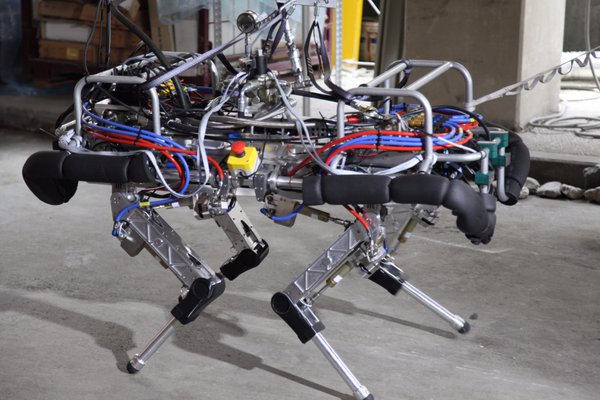
ในปัจจุบัน หุ่นยนต์ 4 ขา ที่มีชื่อว่า Spot ซึ่งได้รับการพัฒนาโดย Boston Dynamics ได้รับความนิยมในสหรัฐอเมริกาเป็นอย่างมาก และสิ่งที่ทีมวิจัย IIT ได้พัฒนาขึ้นนี้ จะช่วยให้หุ่นยนต์ 4 ขา สามารถรองรับการทำงานในรูปแบบต่าง ๆ ได้มากยิ่งขึ้น
ข้อมูลอ้างอิง : engadget
พิสูจน์อักษร : สุชยา เกษจำรัส